自动驾驶比人工驾驶安全三倍?前特斯拉数据科学家揭穿世纪谎言

特斯拉创始人马斯克是自动驾驶/无人驾驶安全性的极力鼓吹者。早在2014年,马斯克就宣称六年内(2020年)无人驾驶技术将比人类驾驶安全10倍。不过近年来随着自动驾驶汽车死亡事故频发,马斯克的统计数字开始趋于保守。2016年,马斯克在挪威奥斯陆能源会议上宣布特斯拉第一代自动驾驶系统AutoPilot 1.0比人类驾驶安全1倍,同年发生那起可以载入自动驾驶汽车史册的致命事故后,特斯拉不但没有踩刹车,反而在10月份发布了号称最高级别全自动驾驶系统的AutoPilot2.0。2018年3月份,马斯克宣称Autopilot 2.0自动驾驶系统比人类驾驶安全2-3倍,并且宣称2018年下半年特斯拉Level 5级别的“完全自动驾驶”将面世。
在鼓吹特斯拉自动驾驶系统安全性时,马斯克特别喜欢引用美国交通安全部门的统计数据,例如对于2016年的特斯拉致命事故,马斯克指出美国交通部统计的人类驾驶死亡事故平均里程为9000万英里,而特斯拉第一次致命事故前已经行驶了1.3亿英里(编者按:忽略了中国邯郸的致命事故,此外2018年以来连续多起致命事故已经让自动驾驶系统的安全里程大打折扣)。
马斯克的“1.3亿英里vs9000万英里”的统计数字游戏闻起来多少有些诡辩的味道,因为特斯拉的1.3亿英里安全里程(不完全自动驾驶)是在人类监督甚至纠错下达成的,而且特斯拉和Uber的致命交通事故大多都是熟练的人类司机完全可以避免的。
那么,在似是而非的统计数字游戏背后,特斯拉自动驾驶系统的安全性到底比人类驾驶高多少?自动驾驶汽车进入市场的最佳时机和节奏应该怎样?最近,数据科学家Brinda A Thomas博士对AutoPilot的安全统计进行了深入剖析并给出了独立分析和结论,原文如下:

图片来源:特斯拉公司
汽车行业正处于大规模试验的开始阶段。如果完全成功,人类就会迎来新的汽车时代,人工驾驶将“沦为”一种在风和日丽的景观道路上兜风的爱好,而乏味痛苦的日常通勤则完全可以由自动驾驶系统代劳,交通事故数量也可能会趋近于零,乘客可以专注于在汽车这个移动办公室中工作和放松。自动驾驶也将为老年人,残疾人和失明人士带来前所未有的的机动性和自主性。
但是今天的汽车自动驾驶技术测试也面临着严峻的形势,如果完全失败,将意味着全球汽车企业在计算机视觉,传感器和自动驾驶系统投入的数十亿美元打了水漂,不但没有实质性的降低交通事故和死亡人数,反而为人类道路交通引入了新的风险。这势必会引起公众的强烈反应,并要求监管机构启动缓慢而昂贵的审查流程,来减缓创新步伐,给这个市场降温,最糟糕的结果使在自动驾驶汽车销售数十万辆后,停止进一步的推广。然后,自动驾驶汽车技术可能会与美国核电行业的遭遇一样,自1979年三里岛事故以来停止建设新的发电厂。
决定自动驾驶技术生死的关键一方面是汽车行业的产品设计和开发能力,另外一个重要方面就是能否负责、谨慎、清晰地与公众沟通从半自动驾驶到全自动驾驶各个阶段的产品安全性。因为自动驾驶汽车(AV)的安全性是一个非常棘手的统计问题。

2017-2018年,特斯拉汽车在开启AutoPilot的状态下不止一次撞上了高速路隔离墩,最近的一次发生在2018年3月23日,导致加州的一位华人工程师丧命
近来特斯拉和Uber的自动驾驶系统产生的一连串致命致伤事故,已经导致专家,记者,汽车制造商和监管机构对自动驾驶技术的安全统计数据的解读出现重大分歧[1]。尤其是过去几个月中,配备自动驾驶仪的特斯拉汽车发生两起致命事故,成为公众瞩目的头条新闻。特斯拉官方宣称其自动驾驶技术的安全性是(美国)人类驾驶的3.7倍,传统车辆的死亡率是8600万英里/人,而配备自动驾驶仪的车辆的死亡率为每3.2亿英里/人,但许多专家质疑这些统计数据背后的方法和数据。在本文中,我将回顾Tesla引用的传统车辆死亡率的统计数据和计算方法,以及目前业界对特斯拉统计方法的三大质疑,提供我的最佳估算,并向监管机构和汽车制造商提供有关自动驾驶汽车安全性的建议。我无法获取数据来验证配备特斯拉自动驾驶仪的车辆的死亡率,但该公司承诺将在未来几个季度向公众发布其自动驾驶仪安全数据。
1. 如何界定自动驾驶仪里程?
我在分析师中常听到的一个质疑是,特斯拉宣称的3.2亿英里/人死亡里程中,哪些才算是真正的“自动驾驶里程”?一些分析人士认为,应该只将自动驾驶仪“接管”车辆的行驶里程与手动驾驶车辆里程的行驶里程进行比较,以获得更真实的死亡率对比。相反,特斯拉的计算方法包括了配备自动驾驶仪车辆的所有行驶英里数,不管是否启用了自动驾驶功能。
我同意特斯拉关于自动驾驶里程的计算方法,因为自动驾驶系统启用时的道路条件(基本上都是高速公路或者有清晰车道标线的道路)与手动驾驶里程有很大的不同。如果在死亡率计算中仅计算启用了自动驾驶仪的里程,则难以获得类似道路条件下驾驶的手动车辆的可比基线里程。况且自动驾驶汽车里程数据在进行靠谱的安全统计时,本来就不太够用(下面详解)。
由于在启用自动驾驶仪的车辆中,手动驾驶里程与手动驾驶车辆驾驶里程涵盖的道路状况有很大不同, 手动驾驶面临更多的弯道,较差的车道标线,雨水或能见度低的天气等等 – 这些都会可能会增加撞车事故的几率,如果这个假设成立,那么这些类型的事故也应该被包括在自动驾驶事故统计统计中,因为它涉及到自动驾驶仪的道路覆盖范围,自动和手动控制之间的切换逻辑,而这些都与特斯拉的产品设计密不可分。
因此,除非拥有自动驾驶功能的车辆从未或很少选择启用该功能,否则,应该将自动驾驶仪车辆的所有里程统计和其他车辆之间进行死亡率安全统计比较,而不是将所谓的“自动驾驶里程”摘出来。
2. 驴头不对马嘴的的车辆型号和死亡事故统计对比
对特斯拉的自动驾驶仪安全统计的另一种批评是对8600万英里/人的死亡率统计数字基准选择的质疑。分析师认为,这一统计数据来自于公路安全保险协会(IIHS)关于致命事故的一般统计数据,其中包括所有车辆类型(汽车,皮卡和SUV,卡车、公交、摩托车)发生的所有死亡事故(司机,乘客,行人),统计出2016年每1亿英里的总死亡人数为1.16人,每8600万英里死亡人数为1人。批评者认为这是“驴头不对马嘴的比较“。
造成车辆死亡事故的主要因素有两个:每辆车的碰撞事故数量,以及每次事故中涉及的乘客或行人的数量[2]。虽然每辆车的碰撞次数与自动驾驶仪的设计有关,但车辆中的乘客人数基本上是随机的。致命碰撞率统计的理想计算应该是任何导致一名或多名司机,乘客或行人死亡的事故人数与每辆车行驶里程数的比率。此外,应该比较类似车型的车辆,即大型豪华轿车与Model S型,大型豪华SUV与Model X车型,中型豪华轿车与Model 3型车型进行对比,因为其驾驶员的人口统计学和驾驶模式更为类似。
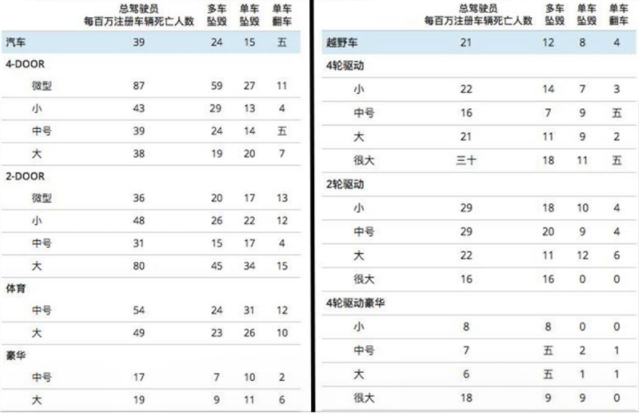
IIHS2017年车型(百万辆)死亡人数统计
不幸的是,IIHS没有提供理想的数据,IIHS的数据要么是所有死亡事故,没有按照车型子类别划分,要么只给出了不同车型驾驶员的死亡率。如果根据所有车型每百万辆机动车每年29-32名死亡人数,以及每辆机动车11,000英里的年平均行驶里程计算,司机的死亡率应该是3.4亿至3.8亿英里/人[3]。不过,包括行人,乘客或司机的死亡事故的死亡率无疑会更高。根据2016年IIHS车祸死亡类型统计,只有不到60%的致命车祸中有司机死亡,该统计不包括摩托车、自行车和卡车司机/乘客。如果我们将车辆碰撞事故包括在其他类型的死亡事故中,发生致命车祸的平均里程数是2.1-2.3亿英里。但是我们并不确定,因为IIHS没有统计每个车型的致命碰撞率,只有驾驶员的死亡率。最后我们估算,特斯拉AutoPilot自动驾驶系统的致命碰撞率,比传统车辆低0-35%左右。(这个数字远低于马斯克宣称的2-3倍)
为什么我的估算的传统车辆死亡率与特斯拉引用的“8600万英里/人”的数值差异这么大?部分原因是因为特斯拉引用的数据包括了所有常规车辆车型的死亡人数,拿来与装备自动驾驶仪的车型对比是不公平的。这种简单粗暴的计算方式不应该被采信,因为它不能反应真相的全部,而且忽略了更大范围的商业和公共政策问题。
3. 该死的谎言和统计
如果生命是一次模拟,那么通过一个简单的算术统计死亡英里数就像是掷骰子游戏。如果一只蝴蝶在中国掀动翅膀,在恰当或者不恰当的时间点发生了一起致命交通事故(编者按:例如邯郸事故),就会让死亡英里数的统计结果产生巨变!根据IIHS的计算方法(称为泊松回归),常规车辆每百万车辆的驾驶者死亡率是29-32人/年。泊松回归常用于模拟随时间变化的独立随机事件(如致命车祸),统计了每辆汽车的行驶里程以获得死亡率的概率估计。特斯拉的3.2亿英里/人的自动驾驶死亡率也应当使用同样的方法重新计算。但饶是如此,IIHS的死亡率统计(29-32人/年)也仅仅是覆盖了全美车辆的一小部分,一些小众车型,例如大型豪华SUV的死亡率非常低,甚至与特斯拉的统计相当。这意味着使用平均死亡率统计(将传统车辆与自动驾驶车辆进行对比)用于政策制定和决策来说是非常不充分的。

数据来源:兰德公司
根据兰德资料显示,汽车产业的政策制定者,汽车制造商和普通大众需要面对这样一个令人不爽的事实:不完全自动驾驶汽车至少需要累积80亿英里的里程,才能获得足够说服力的数据样本,来证明自动驾驶比人类驾驶的安全性高出至少20%。[4]。在短期内,我们其实并不能确定部分自动驾驶汽车比驾驶员更安全。但是,汽车制造商和用户赌信这项技术可以随着时间的推移而改善,并愿意冒险投资或使用它。
推迟自动驾驶技术的推广会产生何种后果?兰德公司开发了一个有用的决策分析工具,让任何人都可以比较部分自动驾驶系统推出的时机、技术的安全性(从50%的安全到几乎完美)以及在2060年几乎完美的自动驾驶汽车成为美国道路上的主流车型前长达几十年的时间段中“可能”挽救的生命。
该模型表明,如果2020年推出与人类驾驶安全性相当或者略高的部分自动驾驶车辆,相比2025年才推出此类车型,在其后50年内将多挽救160,000多条生命,也就是说推迟部分自动驾驶车辆的代价是牺牲很多生命。但这一结论的假设:(1)汽车制造商能够稳步提高部分自动驾驶汽车的安全性和可靠性;(2)驾驶员能够自如舒服地监控自动驾驶汽车,从而避免手动和自动驾驶模式切换带来的新的安全隐患导致死亡率增加。汽车制造商和监管机构应该尽一切努力来验证并确保这些假设是真实的。
兰德发现,当部分自动驾驶汽车安全性比人类驾驶高10%时推向市场是最佳时机,将可以拯救最多的生命。从目前的公开数据中可以看出,自动驾驶技术似乎至少已经达到了人类驾驶的安全水平,如果不是更好。汽车制造商和监管机构应该尽一切努力来验证并确保这些假设是真实的。兰德发现,如果部分自动驾驶车辆比人类驾驶员好10%,那么可以节省大部分人的生命,并且从公开数据中可以看出,自动驾驶仪似乎至少在这个水平上表现得更好,甚至更好。
给监管机构和汽车制造商的建议
NHTSA多年来一直支持过渡到自动驾驶汽车,因为它可以为所有人带来安全和生产力提升的潜在好处,残疾人,失明和老年人也可以获得更多的机动性。如果NHTSA使用IIHS对常规和部分自动驾驶车辆使用的泊松回归方法来协调安全统计的收集和分析,对自动驾驶汽车技术的开发将非常有益。不过这些统计应当更有针对性,例如那些可能在未来几年配备自动驾驶技术的特定车型,例如中型和大型轿车以及SUV。这些数据将非常重要,可以帮助汽车行业和公众了解自动驾驶车辆与传统车辆的参照关系,也有助于消费者做出更加准确的购买决策,
同样,汽车制造商也应该收集并报告部分自动驾驶车辆的安全统计数据,包括致命和非致命车祸的数量,安全气囊的部署,保险杠变形,危险状况,手动接管,以及自动驾驶车辆和非自动驾驶车辆的行驶里程等。当获得足够的行驶里程数据后,就可以使用泊松回归方法计算出靠谱的安全性统计。
根据兰德的研究,“自动驾驶技术的开发者和第三方测试人员还无法确保100辆规模的小型车队每天24小时连轴测试的安全性。而达成80亿英里的目标里程测试需要数以十万计车辆运行多年,来证明自动驾驶技术的安全性已经超过人类。已经有研究人员提出了硬件和软件的模拟+路测的混合测试方法,以获得没有实际道路里程的自动驾驶安全数据。例如,Mobileye一直在开发关于部分自动驾驶汽车应如何处理NHTSA事故数据库中的37个主要预碰撞案例的开源规则。通过功能测试确保部分自动驾驶系统遵循这些规则,不但有助于明确自动驾驶系统的能力,也可帮助制造商减轻责任(尽管一些法律专家对此方法提出质疑)。监管机构将不得不与制造商合作开发和审查这些替代性安全测试,并在通往完全自动驾驶的道路上,“与时俱进”地调整法规。
注释:作者是一位数据科学家,前Tesla员工,没有参与Autopilot开发,并持有TSLA股票。本文没有受到来自特斯拉公司的任何影响,所有的观点都且仅代表作者本人。英文原文地址
[1]一些公司(例如Waymo / Google)认为,部分自动驾驶系统永远不会比人类驾驶更安全,唯一的选择是开发没有方向盘的完全无人驾驶汽车。这场辩论超出了本文的范围。
[2]涉及行人的碰撞处理不仅仅是一个统计问题,它是本文范围之外的一个法律问题。对于传统车辆,司机对行人碰撞负全责,但对于部分和完全自主的车辆,责任和保险费用是司机和汽车制造商之间的共同责任,取决于所声称或实现的自主水平。这是一个需要大量进一步研究和开发定制保险产品的领域。
[3]请注意,这种类型分析的应当使用的正确数据是每辆车行驶的里程数,而不是每个持照驾驶员行驶的车辆行驶里程数,参考FHWA文献中图4-4所示(因为人们可以驾驶多辆汽车);或者也可以采用人均驾驶里程(因为不是所有人都开车),以量化每辆车发生致命车祸的风险。
[4]如果可以获得其他类型的道路交通事故的安全统计数据,如非致命性碰撞事故,保险杠碰撞事故和危险状况,则进行有效统计需要的道路里程数可以减少。但是,目前关于轻微事故和侥幸事故的统计数据还是太少。
第一时间获取面向IT决策者的独家深度资讯,敬请关注IT经理网微信号:ctociocom

除非注明,本站文章均为原创或编译,未经许可严禁转载。
相关文章:
关于作者Cashcow
隐私已经死去,软件正在吃掉世界,数据即将爆炸